Robotics
How Polymath and Foxglove Simplify Fleet Autonomy
October 16, 2025

Polymath Robotics and Foxglove have been working together to streamline how robotic systems are deployed, debugged, and demonstrated in the field. This post highlights two tools that came out of that collaboration: a secure way to access live robot data through a browser and a fast, visual interface for building and managing routes.
Both are now part of Polymath’s standard workflow. They also help customers operate and understand their own fleets faster and with fewer headaches.
Polymath Robotics, founded in 2021 and based in San Francisco, builds autonomy infrastructure for off-road and industrial vehicles. The platform provides modular planning, control, and safety systems designed to support real-world deployments across a wide range of environments. Polymath works with customers in sectors such as defense, logistics, mining, and agriculture – teams that need to operate safely at scale without relying on high-bandwidth connectivity or remote control rooms.
Polymath has robots operating on every kind of network: from cellular to enterprise, and even public WiFi. Getting live data off those systems used to require either sending an engineer onsite or giving a client full VPN access, which was clunky to set up and introduced security concerns.
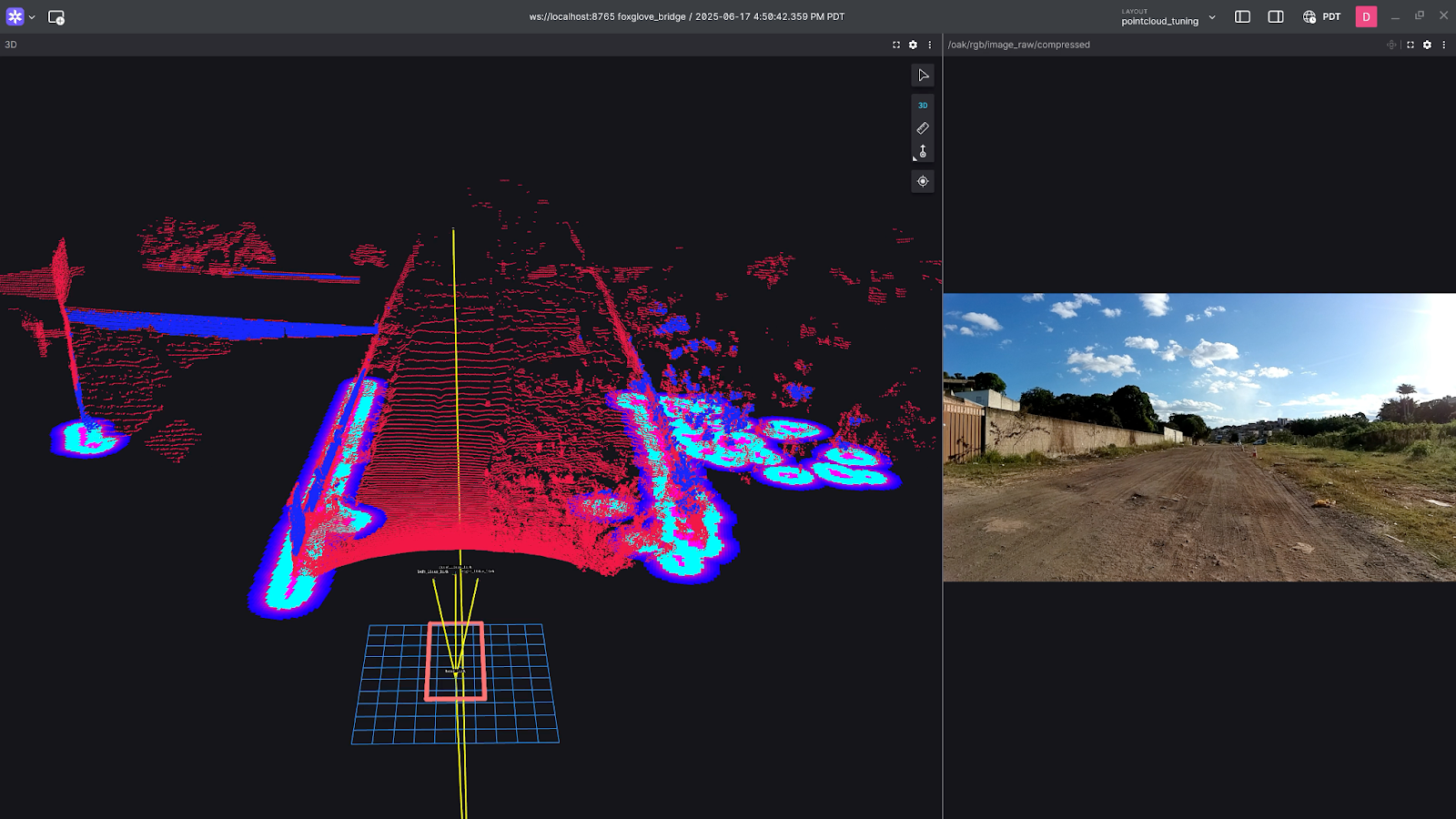
Instead, Polymath uses Tailscale to connect internal systems and robots over a VPN based mesh, and Tailscale Funnel to expose specific services like Foxglove Web safely over the internet. This allows any authorized person to see live robot data in a browser, with no local tooling or VPN setup required.
This setup makes it easy for both Polymath sales teams and customers to pull up live robot data from anywhere, using just a browser. It’s especially powerful during demos or field evaluations, where seeing real-time performance matters.
“The trick is exposing a live robot interface securely, without touching VPN permissions. Funnel makes that possible - and reversible. We can turn it on or off whenever we want. And because Foxglove is already handling all the visualization for us, we can just plug it in and go. No extra work on our side”
— Ilia Baranov, Polymath Robotics
The exact setup:
To expose Foxglove Web over Tailscale Funnel securely, Polymath uses the following commands:
Feel free to try it for yourself!
This gives customers and stakeholders instant observability for testing, debugging, and presentations, without compromising security. It’s simple enough to use in a boardroom demo, but robust enough to support real development.
For autonomy teams, planning a route usually means dealing with waypoints, constraints, and service calls. Before, Polymath engineers wrote these by hand – specifying node IDs, coordinates, and edge logic directly in code. Now, they use a custom control panel built inside Foxglove to design and deploy routes in seconds.
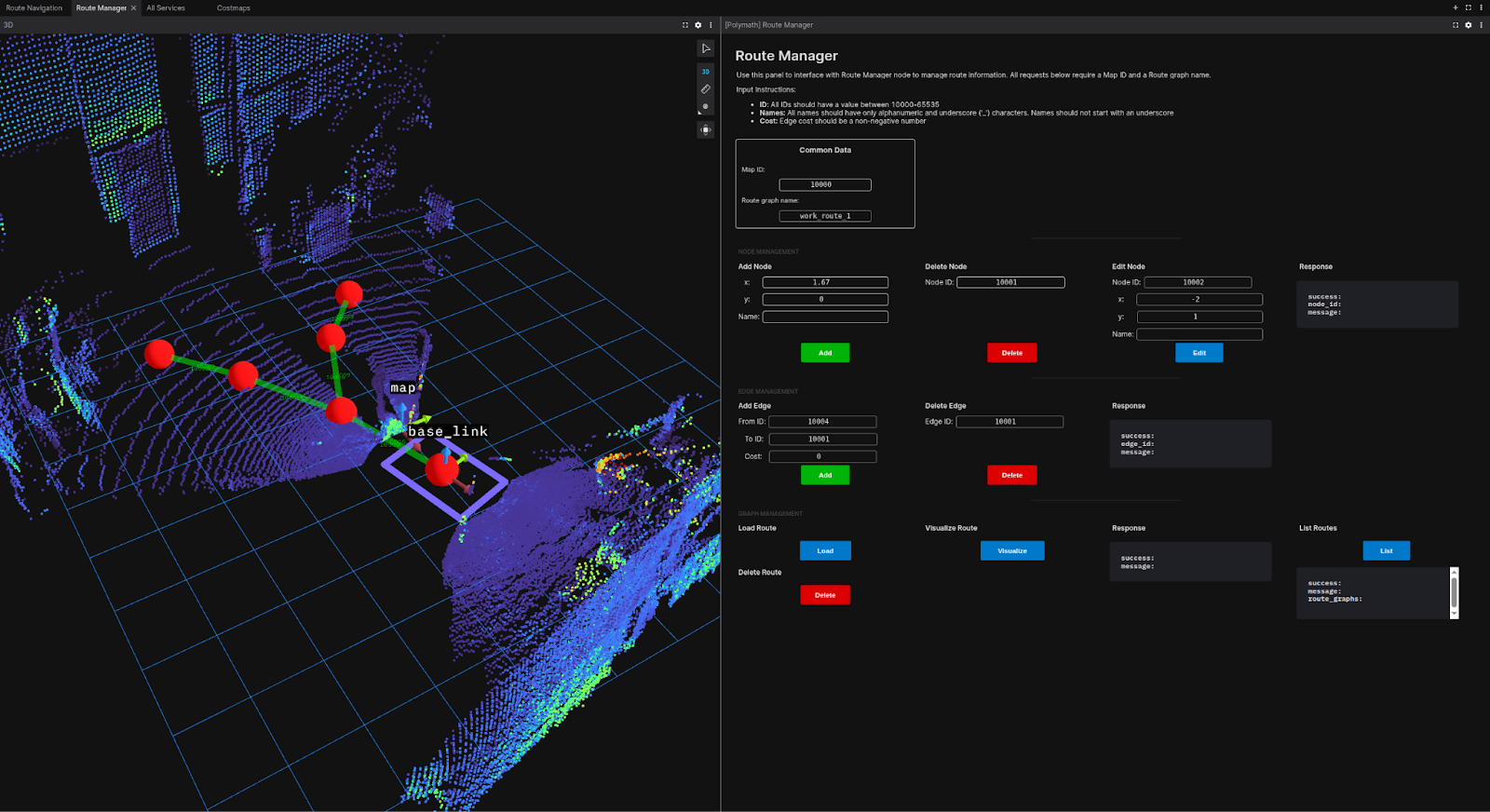
The panel lets engineers drop nodes and draw connections directly inside Foxglove, which already visualizes the robot’s state, environment, and sensor data. Instead of switching between tools, the same interface is used to plan and inspect the outcome.
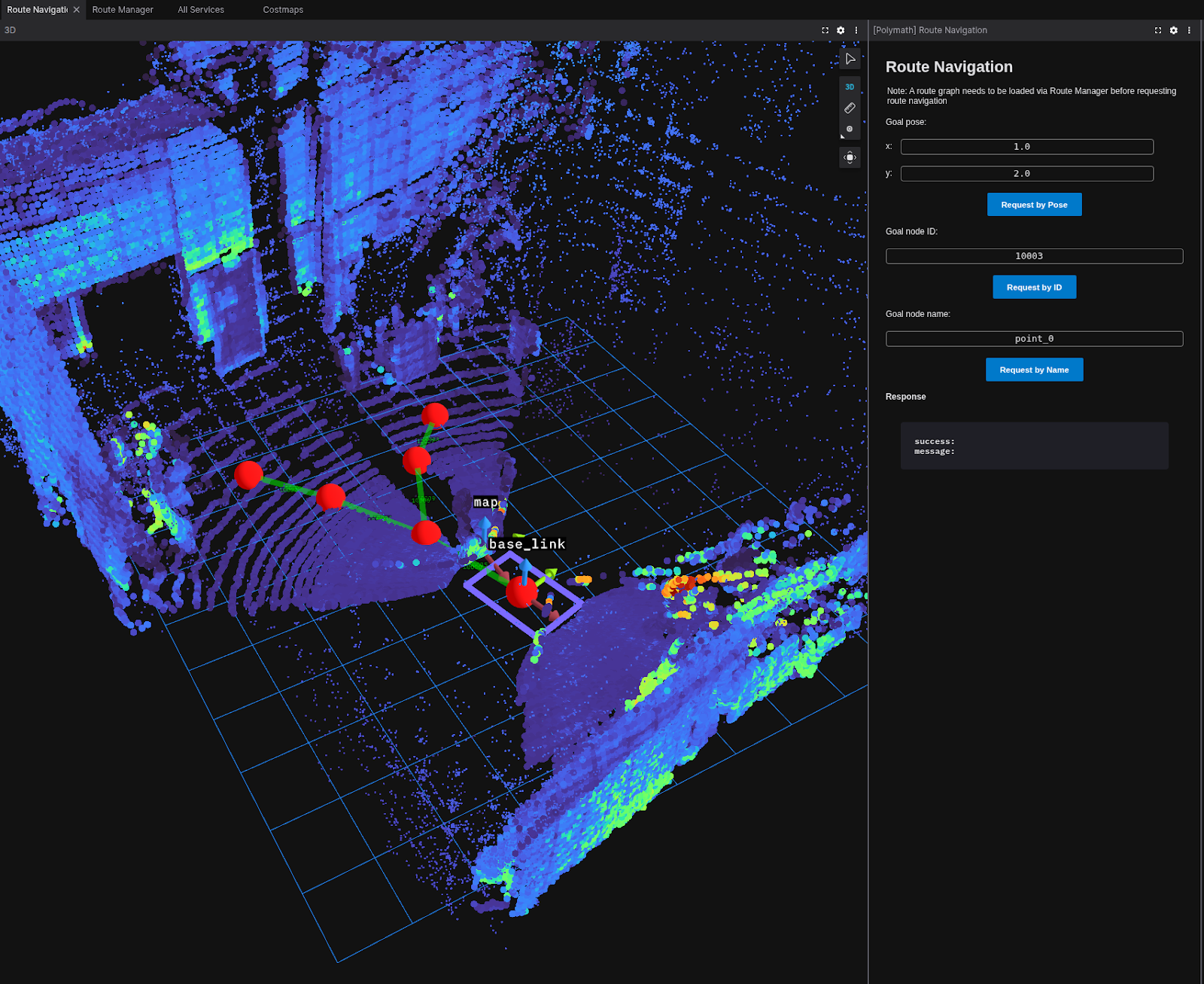
“It’s all in one place. You define the route and immediately see it rendered alongside your lidar, GPS, and map data. You’re not flipping between systems. It just works in one window.”
— Ilia Baranov, CTO & Co-Founder at Polymath Robotics
Graph based planning is especially useful when space is tight, safety zones are strict, or rules of the road apply. For example:
This visual interface has now become the standard engineering tool for internal use and for partners. It’s not consumer facing, but it’s far more usable than a command line or raw ROS service calls.
And since it is built inside Foxglove, any route can be immediately verified against real sensor data. That removes guesswork and tightens the loop between planning and execution.
Polymath could have built a custom visualization engine, but that would have required years of development with no guarantee of matching what already exists in Foxglove. Foxglove supports pointclouds, images, topic / service integration, and shared layouts out of the box.
“If we had to build this ourselves, it would take years, and still be worse. Foxglove lets us focus on core autonomy instead of reinventing visualization.”
— Ilia Baranov
By building control panels and observability on top of Foxglove, Polymath gains a flexible, unified interface that works for both engineers and customers. Everything from sensor diagnostics to mission planning happens in one place.
Polymath’s collaboration with Foxglove has produced two real, usable tools:
These tools are already helping Polymath and its customers move faster, debug more confidently, and deploy with fewer surprises. They are simple to use, robust in the field, and scale cleanly to fleets.
Polymath continues to build in this direction: real tools that lower the barrier to deploying autonomy in production. With partners like Foxglove, the goal is not just smoother workflows, but infrastructure that feels like it belongs in 2025, not 2015.
If you're building autonomy and you're tired of fighting your tools, we think you'll like where this is going.
Watch the full discussion between Polymath CTO Ilia Baranov and Foxglove CEO Adrian Macneil: https://foxglove.dev/events/how-foxglove-and-polymath-simplify-fleet-management
Polymath Robotics and Foxglove have been working together to streamline how robotic systems are deployed, debugged, and demonstrated in the field. This post highlights two tools that came out of that collaboration: a secure way to access live robot data through a browser and a fast, visual interface for building and managing routes.
Both are now part of Polymath’s standard workflow. They also help customers operate and understand their own fleets faster and with fewer headaches.
Polymath Robotics, founded in 2021 and based in San Francisco, builds autonomy infrastructure for off-road and industrial vehicles. The platform provides modular planning, control, and safety systems designed to support real-world deployments across a wide range of environments. Polymath works with customers in sectors such as defense, logistics, mining, and agriculture – teams that need to operate safely at scale without relying on high-bandwidth connectivity or remote control rooms.
Polymath has robots operating on every kind of network: from cellular to enterprise, and even public WiFi. Getting live data off those systems used to require either sending an engineer onsite or giving a client full VPN access, which was clunky to set up and introduced security concerns.
Instead, Polymath uses Tailscale to connect internal systems and robots over a VPN based mesh, and Tailscale Funnel to expose specific services like Foxglove Web safely over the internet. This allows any authorized person to see live robot data in a browser, with no local tooling or VPN setup required.
This setup makes it easy for both Polymath sales teams and customers to pull up live robot data from anywhere, using just a browser. It’s especially powerful during demos or field evaluations, where seeing real-time performance matters.
“The trick is exposing a live robot interface securely, without touching VPN permissions. Funnel makes that possible - and reversible. We can turn it on or off whenever we want. And because Foxglove is already handling all the visualization for us, we can just plug it in and go. No extra work on our side”
— Ilia Baranov, Polymath Robotics
The exact setup:
To expose Foxglove Web over Tailscale Funnel securely, Polymath uses the following commands:
Feel free to try it for yourself!
This gives customers and stakeholders instant observability for testing, debugging, and presentations, without compromising security. It’s simple enough to use in a boardroom demo, but robust enough to support real development.
For autonomy teams, planning a route usually means dealing with waypoints, constraints, and service calls. Before, Polymath engineers wrote these by hand – specifying node IDs, coordinates, and edge logic directly in code. Now, they use a custom control panel built inside Foxglove to design and deploy routes in seconds.
The panel lets engineers drop nodes and draw connections directly inside Foxglove, which already visualizes the robot’s state, environment, and sensor data. Instead of switching between tools, the same interface is used to plan and inspect the outcome.
“It’s all in one place. You define the route and immediately see it rendered alongside your lidar, GPS, and map data. You’re not flipping between systems. It just works in one window.”
— Ilia Baranov, CTO & Co-Founder at Polymath Robotics
Graph based planning is especially useful when space is tight, safety zones are strict, or rules of the road apply. For example:
This visual interface has now become the standard engineering tool for internal use and for partners. It’s not consumer facing, but it’s far more usable than a command line or raw ROS service calls.
And since it is built inside Foxglove, any route can be immediately verified against real sensor data. That removes guesswork and tightens the loop between planning and execution.
Polymath could have built a custom visualization engine, but that would have required years of development with no guarantee of matching what already exists in Foxglove. Foxglove supports pointclouds, images, topic / service integration, and shared layouts out of the box.
“If we had to build this ourselves, it would take years, and still be worse. Foxglove lets us focus on core autonomy instead of reinventing visualization.”
— Ilia Baranov
By building control panels and observability on top of Foxglove, Polymath gains a flexible, unified interface that works for both engineers and customers. Everything from sensor diagnostics to mission planning happens in one place.
Polymath’s collaboration with Foxglove has produced two real, usable tools:
These tools are already helping Polymath and its customers move faster, debug more confidently, and deploy with fewer surprises. They are simple to use, robust in the field, and scale cleanly to fleets.
Polymath continues to build in this direction: real tools that lower the barrier to deploying autonomy in production. With partners like Foxglove, the goal is not just smoother workflows, but infrastructure that feels like it belongs in 2025, not 2015.
If you're building autonomy and you're tired of fighting your tools, we think you'll like where this is going.
Watch the full discussion between Polymath CTO Ilia Baranov and Foxglove CEO Adrian Macneil: https://foxglove.dev/events/how-foxglove-and-polymath-simplify-fleet-management
Get updates & robotics insights from Polymath when you sign up for emails.
