Robotics
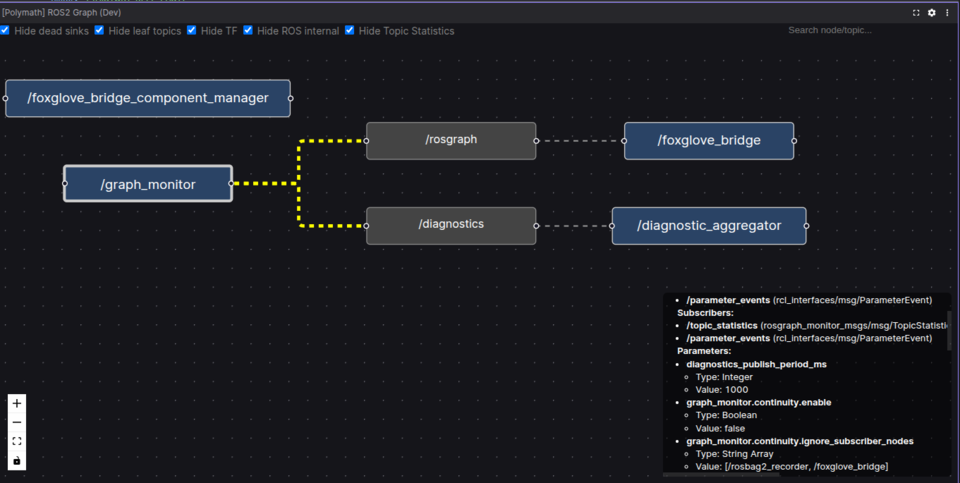
ROS2 Graph Monitor: A Continuous Snapshot of Your Robot’s State
Meet our open-source ROS2 Graph Monitor with a Foxglove extension -- giving engineers a continuous, queryable snapshot of their robot’s system state to simplify debugging and analysis.

September 4, 2025